|
I obtained my Ph.D. from University of Amsterdam, the Netherlands, focusing on computer vision and deep learning. I did internship at Qualcomm AI Research, Netherlands in 2020. I was a visiting research intern at the University of Queensland, Australia in 2014. |

|




|
I am interested in 3D computer vision and video understanding. I have a good understanding of multiple view geometry and I am passionate about Autonomous driving and AR/VR. In particular, I have experience with:
|
|
|
|
[Sep. 22, 2021] I have recently defended my doctorate of philosophy. 🎉
|
{kind=link}
|
|
|
|
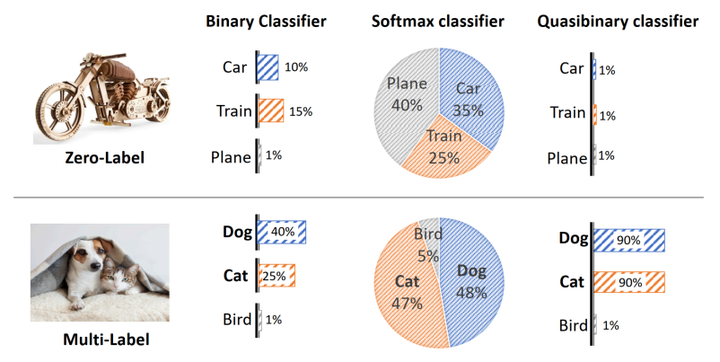
Shuai Liao, Efstratios Gavves, ChangYong Oh, Cees G. M. Snoek ICPR, 2020 poster / bibtex It is well-known that one-vs.-rest classification and multi-label classification need to be handled by the right classifier, i.e. softmax classifier vs. sigmoid classifiers. Could it be simpler? Yes. Quasibinary classifier might be the only classifier you need. And even better, Quasibinary classifier yields well-calibrated probabilities that are critical to tasks such as autonomous driving and clinical diagnosis. |
|
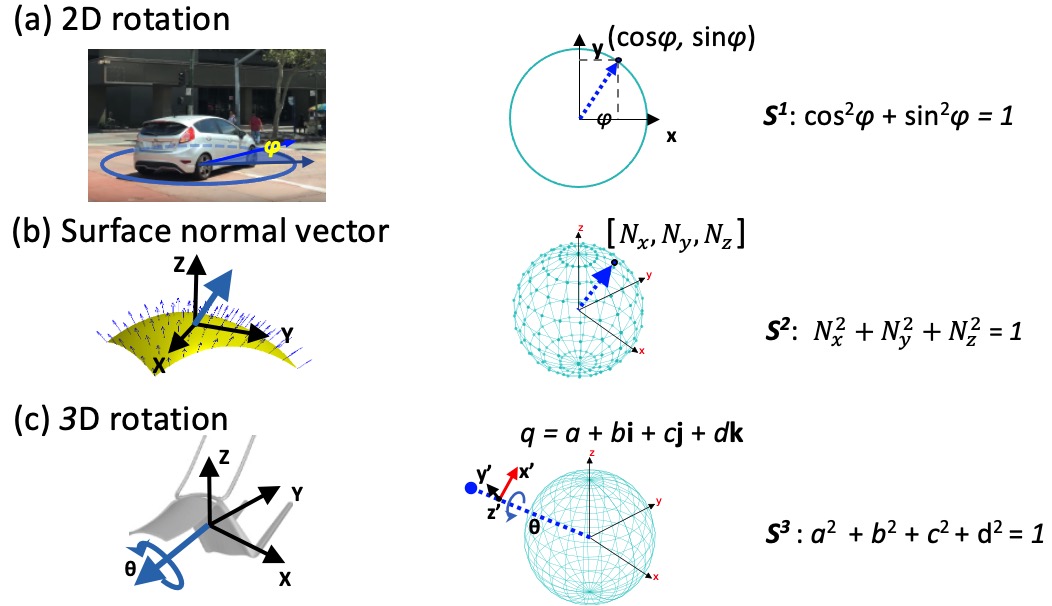
Shuai Liao, Efstratios Gavves, Cees G. M. Snoek CVPR, 2019 project page / bibtex / arXiv / supplemental materials Regression problems have always been tricky for deep neural networks to learn, mainly due to unstable gradient. To resolve this, we proposal spherical regression, a plugin module that boosts the performance for three regression tasks in computer vision at the same time. We also present a 3D rotation estimation dataset called ModelNet10-SO3. |
|
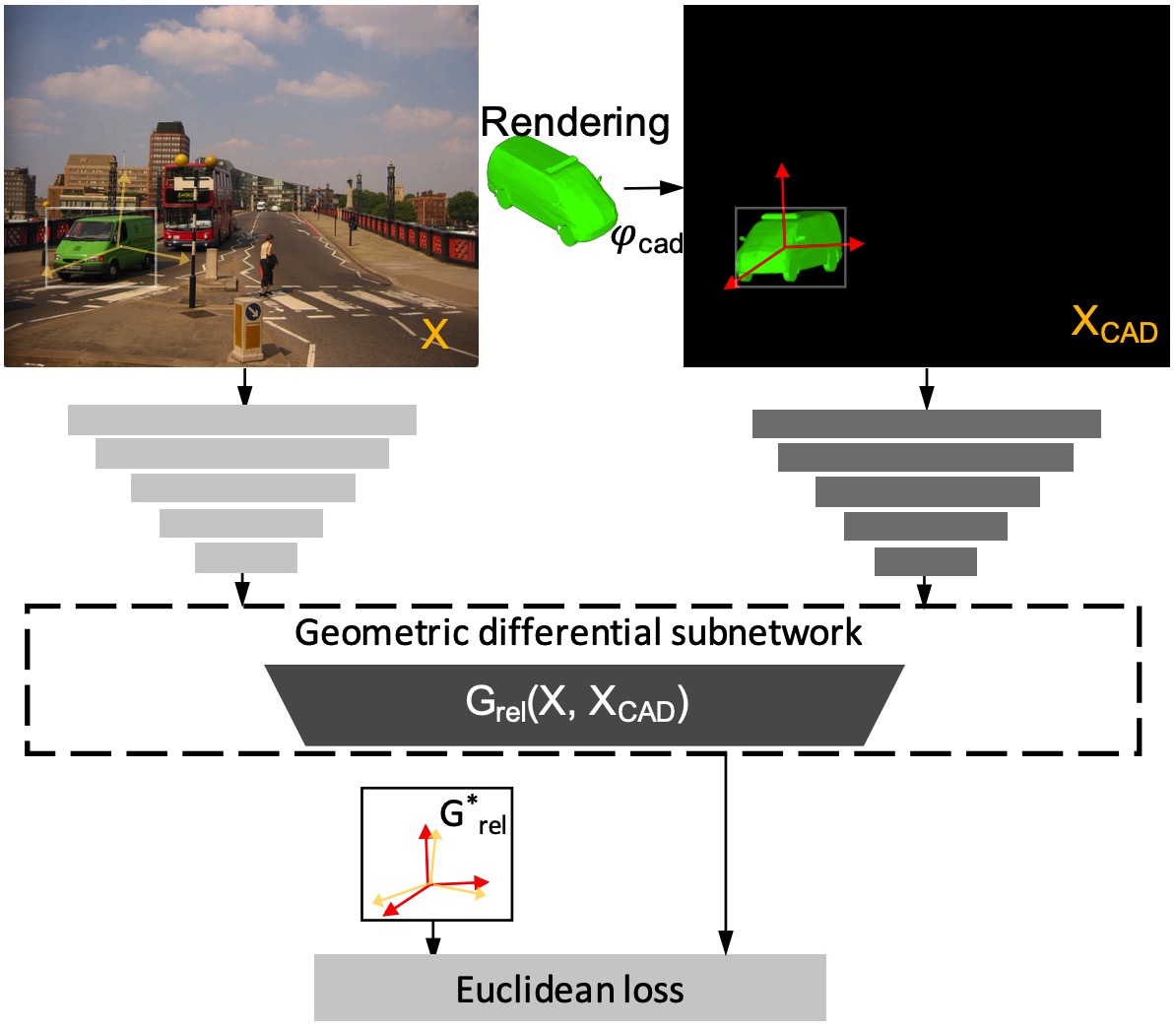
Shuai Liao, Efstratios Gavves, Cees G. M. Snoek ICMR, 2018 poster / bibtex We present a pipeline that automatically selects and aligns textureless 3D shapes (e.g. CAD models) onto 2D images. This is particular useful for collecting training data for autonomous driving. |
|
Shuai Liao, Xirong Li, Heng Tao Shen Yang Yang Xiaoyong Du IEEE Transactions on Multimedia (TMM), 2015 bibtex |
|
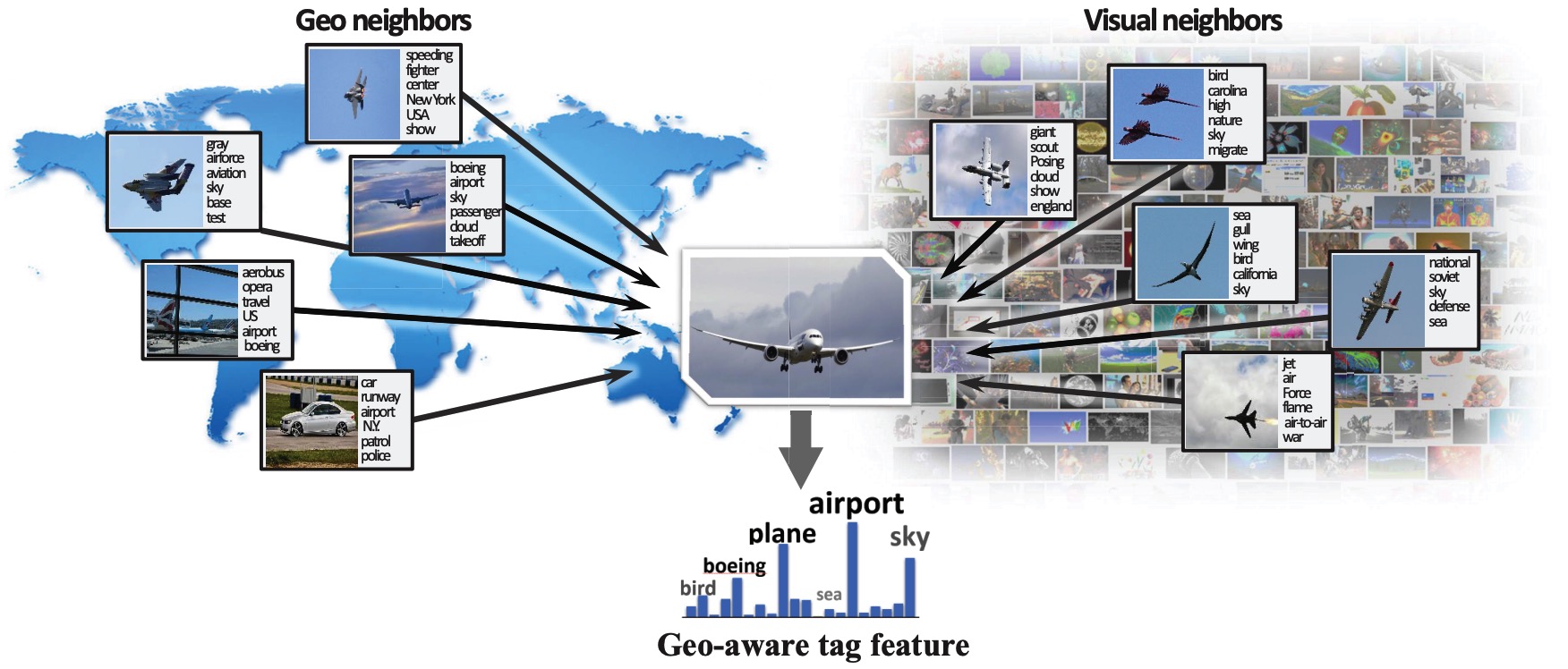
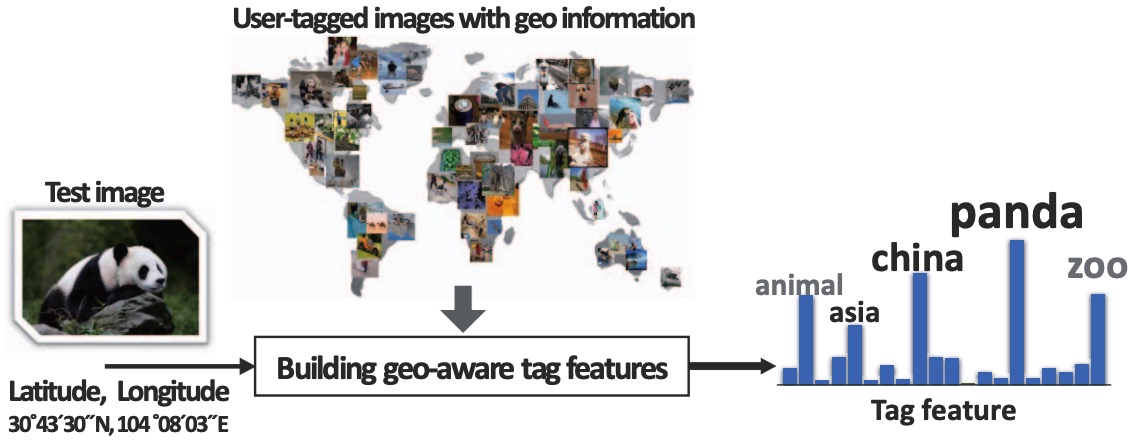
Xirong Li, Shuai Liao, Weiyu Lan, Xiaoyong Du, Gang Yang SIGIR, 2015 project page / bibtex |
|
Shuai Liao, Xirong Li, Xiaoxu Wang, Xiaoyong Du IEEE International Conference on Multimedia and Expo (ICME), 2014 bibtex |
|
|
|
|
| Reviewer for |
Conference on Neural Information Processing Systems (NeurIPS) International Conference on Learning Representations (ICLR) Conference on Computer Vision and Pattern Recognition (CVPR) European Conference on Computer Vision (ECCV) AAAI Conference on Artificial Intelligence (AAAI) Transactions on Multimedia Computing Communications and Applications(TOMM) ACM Multimedia (ACMMM) ACM International Conference on Multimedia Retrieval (ICMR) |
| Teaching for |
Computer Vision Master course, 2016 Applied Machine Learning Master course 2018, 2019 Behavior-Based Robotics Bachelor course, 2018 |
| Supervision for |
Master thesis: Pose estimation of ships at port of Rotterdam. (2019-2020) |
|
Website adapted from this source code. |